 Date: 30 March 2021, 8:00 – 11:30 GMT
Date: 30 March 2021, 8:00 – 11:30 GMT
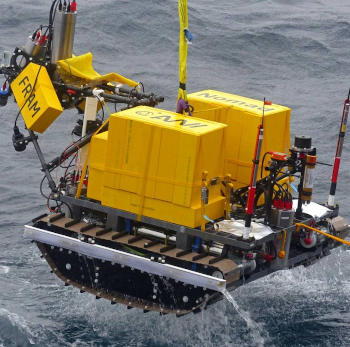
Course summary: An introduction into the engineer's approach for developing scientific subsea technology. Emphasis was on enhancing understanding and communication between engineers and scientists in polar marine research. In addition to the theoretical part which included principal considerations and limitations, construction design and 3D modeling, participants used this knowledge to design a marine robot themselves!
Course Slideshow - Elena Schiller
ARICE Technical Training: How to build a deep sea robot from APECS Webinars on Vimeo.
Photo: Alfred Wegener Institute
Speaker:
-
Elena Schiller, Construction Engineer at the Alfred Wegener Institute, HGF-MPG Group for Deep Sea Ecology and Technology, Germany
I'm a B.Sc. Mechanical Engineer and a Scientific Diver and I've been working at AWI in Bremerhaven since 2018 as a construction engineer, designing the third AWI Benthic Crawler. In 2019, I took part in a 9-weeks cruise on the research vessel Sonne. For my Bachelor Thesis, I developed a buoyancy system for an upgrade of JAGO, the crewed submersible at GEOMAR in Kiel. Being a woman in three male-dominated workspaces at once (engineering, science and seafaring), while at the same time being an engineer in and for a science environment, I take pleasure in overcoming boundaries between separated worlds by providing a platform where we can communicate and learn how to understand each other better. My motivation to take part in this training is to increase understanding and awareness among the new researcher's generation for the engineer's perspective so that the two worlds can work better together and also to increase the visibility of women's contribution to polar research.
-
Course outline
- Introduction: Who even builds deep sea robots and why?
- The steps of doing magic: From a scientist's demand to a diving science machine
- How to find out what a scientist wants
- Where to start
- Principal decisions and outlines
- Construction design - or how to make it work
- 3D modelling - or how to show a scientist what you intend to build
- Technical drawings and manufacturing - or how to make it real
- Assembly and tests - or how not to panic
- Deployment at sea - or how not to totally panic
- Q&A
- Practical part: Design a deep sea robot! Starting off on a typical scientist's demand (like "I want to take sediment samples in close proximity of this particular type of coral in 4000 m depth" or "I need a seasonal cycle of water samples in 4000 m depth" or "I want a 1-week time lapse visual footage of this oyster bank at 300 m depth"), participants will have the unique chance to brainstorm in small groups. During ~45 minutes of interdisciplinary exchange they will discuss technical solutions presented in 2.c and d, and sketch a design idea for a technical solution to their scientist's demand. The course concludes with a discussion of the results in the larger group. Who knows, maybe the next deep sea robot will be born on March 30!?
 Date: 12 April 2021, 8:00 – 11:30 GMT
Date: 12 April 2021, 8:00 – 11:30 GMT
 Date: 13 April 2021, 16:00 – 18:30 GMT
Date: 13 April 2021, 16:00 – 18:30 GMT Date: 14 April 2021, 8:00 – 9:30 GMT
Date: 14 April 2021, 8:00 – 9:30 GMT Date: 14 April 2021, 13:00 – 14:30 GMT
Date: 14 April 2021, 13:00 – 14:30 GMT